移еӢ•зҡ„зү©й«”еңЁдёҚеҸ—еӨ–еҠӣжҲ–еҗҲеҠӣзӮәйӣ¶зҡ„жўқ件дёӢпјҢе…·жңүдҝқжҢҒ其移еӢ•зӢҖж…Ӣзҡ„ж…ЈжҖ§пјҢйҖҷзЁұзӮәеӢ•йҮҸе®ҲжҒҶпјӣж—ӢиҪүзҡ„йҷҖиһәжҲ–йЈӣијӘеңЁжүҖеҸ—еҗҲеҠӣзҹ©зӮәйӣ¶зҡ„жғ…жіҒдёӢпјҢд№ҹе…·жңүдҝқжҢҒе…¶иҪүеӢ•зӢҖж…Ӣзҡ„ж…ЈжҖ§пјҢйҖҷзЁұзӮәи§’еӢ•йҮҸе®ҲжҒҶ
ж—ӢиҪүзҡ„йҷҖиһәжҲ–йЈӣијӘеҖҳиӢҘеҸ—еҲ°дёҖеҖӢеҠӣзҹ©пјҢе°ұжңғз”ўз”ҹи§’еӢ•йҮҸзҡ„и®ҠеҢ–иҖҢеҪўжҲҗВ йҖІеӢ•пјҲPrecessionпјү
йҷҖиһәе„ҖеҚізӮәеҹәж–ји§’еӢ•йҮҸе®ҲжҒҶзҡ„зҗҶи«–иҖҢиЁӯиЁҲз”ЁдҫҶз¶ӯжҢҒжҲ–ж„ҹжё¬ж–№еҗ‘зҡ„иЈқзҪ®
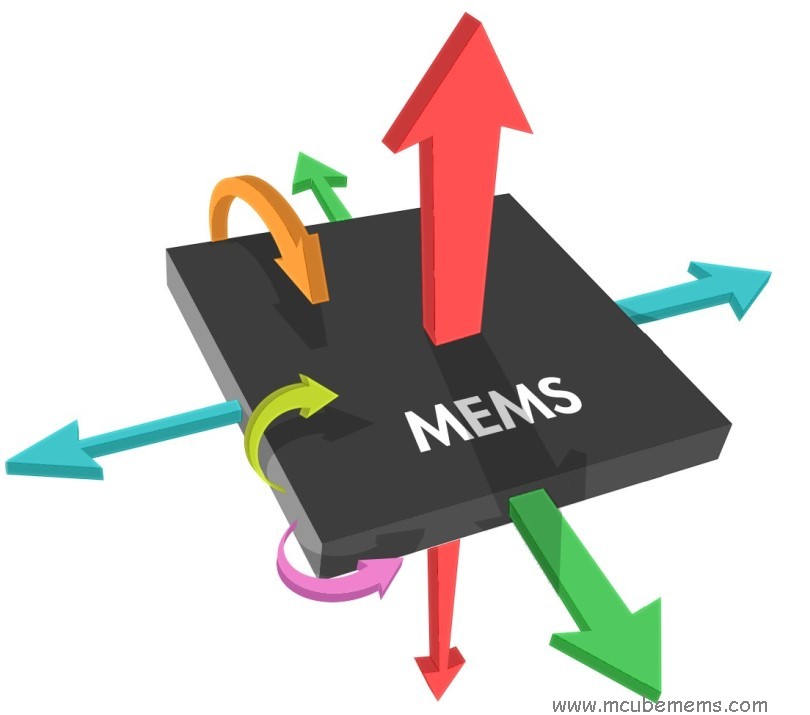
йӮЈйәјйҷҖиһәе„ҖиҰҒеҰӮдҪ•еЎһйҖІжүӢж©ҹе‘ўпјҹйҖҷжҳҜи—үз”ұВ еҫ®ж©ҹйӣ»зі»зөұпјҲMicroelectromechanical SystemsпјҢMEMSпјүзҡ„е°Ҹе°ҒиЈқжҠҖиЎ“
дёҰдё”йҒӢз”ЁеӮ…科ж“әзҡ„жҰӮеҝө
еӣ зӮәеңЁиҪүеӢ•зҡ„еә§жЁҷзі»жңғз”ўз”ҹдёҖзЁ®еҒҸеҗ‘зҡ„ 科ж°ҸеҠӣпјҢеҠӣзҡ„ж–№еҗ‘еһӮзӣҙж–јзү©й«”зҡ„йҒӢеӢ•ж–№еҗ‘пјҢдҪҝж„ҹжё¬иіӘйҮҸзҷјз”ҹдҪҚ移гҖӮз”ұж–јдҪҚ移еӨ§е°ҸиҲҮж—ӢиҪүзҡ„и§’йҖҹзҺҮжҲҗжӯЈжҜ”пјҢж„ҹжё¬зҡ„еӢ•йӣ»жҘөжңғиҲҮеӣәе®ҡйӣ»жҘөд№Ӣй–“зҷјз”ҹйЎҚеӨ–зҡ„и·қйӣўи®ҠеҢ–йҮҸпјҢеҫһиҖҢи®“дәҢиҖ…д№Ӣй–“зҡ„йӣ»е®№еҖјз”ўз”ҹеҒҸе·®пјҢеӣ жӯӨж–ҪеҠ еңЁжүӢж©ҹе…§йғЁйҷҖиһәе„Җе…ғ件зҡ„ж—ӢиҪүи§’еәҰе°ұиғҪиҪүеҢ–жҲҗдёҖеҖӢйӣ»и·ҜеҸҜд»ҘжӘўжё¬зҡ„иіҮиЁҠдәҶпјҒ
й ҶдҫҝдҫҶиҒҠиҒҠжүӢж©ҹзҡ„еҸҰдёҖеҖӢMEMSе…ғ件 – зЈҒж„ҹжё¬еҷЁгҖӮе°ұеҰӮеҗҢжүӢж©ҹе…§зҡ„йҷҖиһәе„ҖдёҰйқһе°ҮеӮізөұйҷҖиһәе„Җзё®е°ҸеҫҢеЎһе…ҘпјҢжүӢж©ҹдёӯзҡ„зЈҒж„ҹжё¬еҷЁд№ҹдёҚжҳҜжҠҠдёҖеҖӢеҸҜд»Ҙз№һи»ёж—ӢиҪүзҡ„зЈҒйҮқеЎһйҖІеҺ»пјҲйӣ–然иһўе№•дёҠд»ҚжҳҜе‘ҲзҸҫжҢҮеҢ—йҮқзҡ„еӨ–и§ҖпјүпјҢзЈҒдҝЎиҷҹйӮ„жҳҜеҫ—е…ҲиҪүеҢ–жҲҗзӮәйӣ»и·ҜеҸҜд»Ҙиҷ•зҗҶзҡ„йӣ»дҝЎиҷҹжүҚиЎҢгҖӮдёӯеӯёзҡ„зү©зҗҶиӘІдёҠеҲ°йӣ»зЈҒжҷӮпјҢжңүжҸҗеҲ°йӣ»жөҒзЈҒж•ҲжҮүиҲҮйӣ»зЈҒж„ҹжҮү…
дёҚйҒҺз”ұж–јж„ҹжҮүз·ҡеңҲзҡ„йқҲж•ҸеәҰиҲҮе–®дҪҚй•·еәҰе…§зҡ„з·ҡеңҲеҢқж•ёжҲҗжӯЈжҜ”пјҢеӣ жӯӨйӣ¶д»¶йӣЈд»Ҙеҫ®е°ҸеҢ–пјҢиҖҢйҖҷд№ҹжҳҜйӣ»ж„ҹеҫҲе°‘е°ҒиЈқеңЁICе…§зҡ„еҺҹеӣ д№ӢдёҖпјҲеҸҰеӨ–д№ҹеҸҜйҒҝе…Қе№Іж“ҫMOSе…ғ件пјүгҖӮе·ҘжҘӯдёҠеёёиҰӢзҡ„зЈҒж„ҹжҮүиЈқзҪ®жҳҜйңҚзҲҫж•ҲжҮүеӮіж„ҹеҷЁпјҲHall sensorпјүпјҢе®ғеҸҜжҮүз”ЁеңЁжұҪи»Ҡзҡ„ABSзі»зөұдёӯ
е®ғзҡ„йҮҸжё¬зҜ„еңҚеҸҜеҫһ 10 nT ~ 20 T пјҢ йӣ–然еҸ°зҒЈзҡ„ж°ҙе№іең°зЈҒеј·еәҰеҫһжңҖеҢ—з«Ҝзҡ„35810 nTпјҲе®ңиҳӯзёЈйҮЈйӯҡеҸ°пјүеҲ°жңҖеҚ—з«Ҝзҡ„40530 nTпјҲй«ҳйӣ„еёӮж——жҙҘеҚҖеӨӘе№іеі¶пјүеқҮиҷ•ж–ј Hall sensor зҡ„еҸҜйҮҸжё¬зҜ„еңҚе…§пјҢдҪҶжҳҜеҸҜйҮҸжё¬зҜ„еңҚеӨ§е°ұж„Ҹе‘іи‘—дёҚеӨ йқҲж•ҸпјҲе°ұеҰӮеҗҢжӢҝй«”йҮҚиЁҲеҺ»з§ӨеҢ–еӯёи—Ҙе“ҒеҠ‘йҮҸпјүгҖӮеӣ жӯӨпјҢе…·жңүијғй«ҳйқҲж•ҸеәҰзҡ„зЈҒйӣ»йҳ»ж•ҲжҮүеӮіж„ҹеҷЁпјҲ100 pT ~ 100 mTпјүжҳҜеҒҡзӮәең°зЈҒж„ҹжё¬еҷЁзҡ„йҰ–йҒёж–№жЎҲгҖӮ

зЈҒйӣ»йҳ»ж•ҲжҮүпјҲMagnetoresistanceпјүжҳҜжҢҮжқҗж–ҷд№Ӣйӣ»йҳ»йҡЁи‘—еӨ–еҠ зЈҒе ҙзҡ„и®ҠеҢ–иҖҢж”№и®Ҡзҡ„ж•ҲжҮүпјҢе…¶дёӯзҡ„з•°еҗ‘зЈҒйҳ»пјҲAnisotropic magnetoresistance, AMRпјүеүҮжҳҜжҢҮжҹҗдәӣжқҗж–ҷдёӯзҡ„йӣ»йҳ»и®ҠеҢ–иҲҮгҖҢзЈҒе ҙе’Ңйӣ»жөҒд№Ӣй–“зҡ„еӨҫи§’гҖҚжңүй—ңпјҢйҖ жҲҗйҖҷзЁ® зЈҒжҖ§еҗ„еҗ‘з•°жҖ§ зҡ„ж©ҹеҲ¶е’Ңжқҗж–ҷзҡ„ йӣ»еӯҗиҮӘж—ӢиҲҮи»ҢйҒ“и§’еӢ•йҮҸиҖҰеҗҲ (spin-orbital coupling)ж•ҲжҮүжңүй—ңгҖӮдёҖзЁ®з”ұй«ҳзЈҒе°ҺзҺҮеҗҲйҮ‘(Fe-Ni)жүҖиЈҪжҲҗзҡ„и–„иҶңйӣ»йҳ»ж–јжҳҜиў«з”ЁдҫҶиЈҪдҪңжүӢж©ҹдёӯзҡ„зЈҒж„ҹжё¬еҷЁпјҢе…¶дёҚеғ…жҜ” Hall sensor йқҲж•ҸпјҢжүҖи®ҖеҸ–зҡ„зЈҒеҢ—и§’еәҰд№ҹеҸҜд»ҘзІҫзўәеҲ° 1В° зҡ„иӘӨе·®зҜ„еңҚе…§
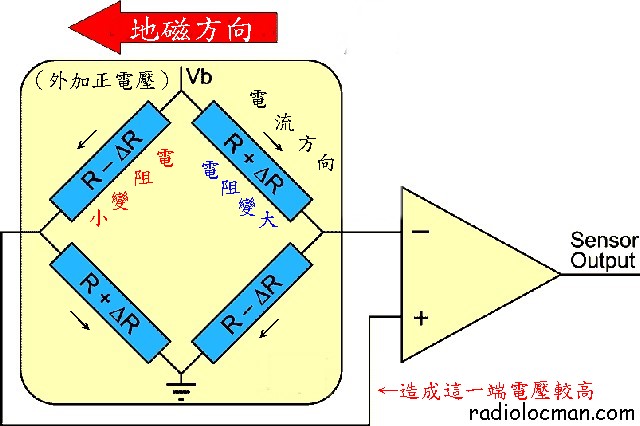
йӣ»и·Ҝзҡ„иЁӯиЁҲеүҮжҳҜе°Ү4еҖӢзӣёеҗҢзҡ„зЈҒйӣ»йҳ»йҖЈжҺҘжҲҗжғ ж–ҜеҗҢйӣ»ж©Ӣзҡ„еҪўејҸпјҢз”ұж–јжөҒ經еҗ„йӣ»йҳ»зҡ„йӣ»жөҒзӣёеҗҢпјҢиӢҘйӣ»йҳ»и®Ҡе°ҸжңғйҖ жҲҗйӣ»йҳ»е…©з«Ҝзҡ„йӣ»дҪҚйҷҚд№ҹи®Ҡе°ҸпјҢжүҖд»ҘдёӢең–дёӯе·Ұз«Ҝзҡ„йӣ»дҪҚе°ұжңғй«ҳж–јеҸіз«ҜгҖӮеӣ жӯӨеҸӘиҰҒеҶҚеҠ дёҠдёҖеҖӢж–№еҗ‘йҡЁжҷӮй–“жҢҜзӣӘзҡ„зЈҒе ҙпјҢеҚіеҸҜиҲҮе…¶е°Қз…§дҫҶеҫ—еҮәең°зЈҒж–№еҗ‘
еңЁеҫ®ж©ҹйӣ»зі»зөұпјҲMEMSпјүзҡ„е°Ҹе°ҒиЈқжҠҖиЎ“дёӢпјҢи–„иҶңйӣ»йҳ»зҡ„иЈҪзЁӢе·Іеҫһж—©жңҹзҡ„зҶұи’ёйҚҚж”№жҲҗзӣ®еүҚеёёз”Ёзҡ„жҝәйҚҚиҲҮиқ•еҲ»пјҢзЈҒж„ҹжё¬еҷЁд№ҹжңқеҗ‘йқҲж•ҸеәҰжҜ” AMR й«ҳеҮәж•ёзҷҫеҖҚзҡ„ GMR жҲ– TMR зҡ„ж–№еҗ‘зҷјеұ•гҖӮжҲ–иЁұеңЁдёҚд№…зҡ„е°ҮдҫҶпјҢйҖҷзЁ®й«ҳйқҲж•ҸеәҰзҡ„еҫ®еһӢжЁЎзө„еҸҜжңӣжҲҗзӮәжҷәж…§зңјйҸЎзҡ„е…ғ件д№ӢдёҖ вҶ’ “Recent Developments of Magnetoresistive Sensors for Industrial Applications“