
繼上一篇《淺談陀螺儀》之後,今天再來聊聊手機的另一個MEMS元件-磁感測器。就如同手機內的陀螺儀並非將傳統陀螺儀縮小後塞入,手機中的磁感測器也不是把一個可以繞軸旋轉的磁針塞進去(雖然螢幕上仍是呈現指北針的外觀),磁信號還是得先轉化成為電路可以處理的電信號才行。中學的物理課上到電磁時,有提到電流磁效應與電磁感應…
不過由於感應線圈的靈敏度與單位長度內的線圈匝數成正比,因此零件難以微小化,而這也是電感很少封裝在IC內的原因之一(另外也可避免干擾MOS元件)。工業上常見的磁感應裝置是霍爾效應傳感器(Hall sensor),它可應用在汽車的ABS系統中
它的量測範圍可從 10 nT ~ 20 T , 雖然台灣的水平地磁強度從最北端的35810 nT(宜蘭縣釣魚台)到最南端的40530 nT(高雄市旗津區太平島)均處於 Hall sensor 的可量測範圍內,但是可量測範圍大就意味著不夠靈敏(就如同拿體重計去秤化學藥品劑量)。因此,具有較高靈敏度的磁電阻效應傳感器(100 pT ~ 100 mT)是做為地磁感測器的首選方案。

磁電阻效應(Magnetoresistive Sensor)是指材料之電阻隨著外加磁場的變化而改變的效應,其中的異向磁阻(Anisotropic magnetoresistance, AMR)則是指某些材料中的電阻變化與「磁場和電流之間的夾角」有關,造成這種磁性各向異性的機制和材料的電子自旋與軌道角動量耦合 (spin-orbital coupling)效應有關。下列影片展示了磁場和電流之間的夾角改變時的電阻值變化(註:電池方向畫反了,馬蹄形磁鐵也應改成棒型磁鐵才容易明瞭此機制,請留意紅色箭號所代表的外界磁場方向即可)
一種由高磁導率合金(Fe-Ni)所製成的薄膜電阻於是被用來製作手機中的磁感測器,其不僅比 Hall sensor 靈敏,所讀取的磁北角度也可以精確到 1° 的誤差範圍內
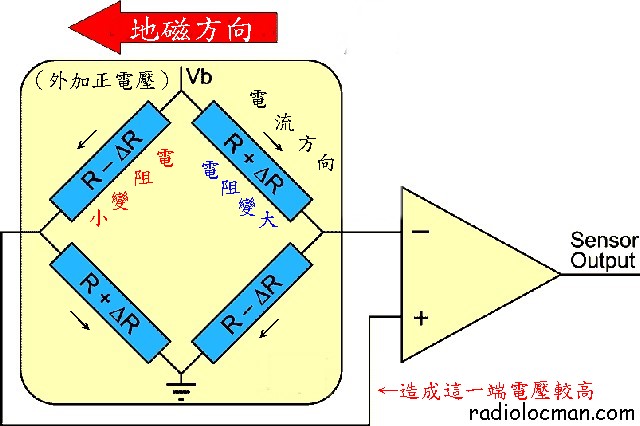
電路的設計則是將4個相同的磁電阻連接成惠斯同電橋的形式,由於流經各電阻的電流相同,若電阻變小會造成電阻兩端的電位降也變小,所以下圖中左端的電位就會高於右端。因此只要再加上一個方向隨時間振盪的磁場,即可與其對照來得出地磁方向
在微機電系統(MEMS)的小封裝技術下,薄膜電阻的製程已從早期的熱蒸鍍改成目前常用的濺鍍與蝕刻,磁感測器也朝向靈敏度比 AMR 高出數百倍的 GMR 或 TMR 的方向發展。或許在不久的將來,這種微型模組可望成為智慧眼鏡的元件之一 →”Recent Developments of Magnetoresistive Sensors for Industrial Applications“